世界上第一个基于易撞密歇根十字路口的逼真模拟驾驶环境
第一个统计上逼真的道路模拟是由密歇根大学的研究人员开发的。虽然它目前代表了一个特别危险的环形交叉路口,但未来的工作将扩大到包括测试自动驾驶汽车软件的其他驾驶情况。
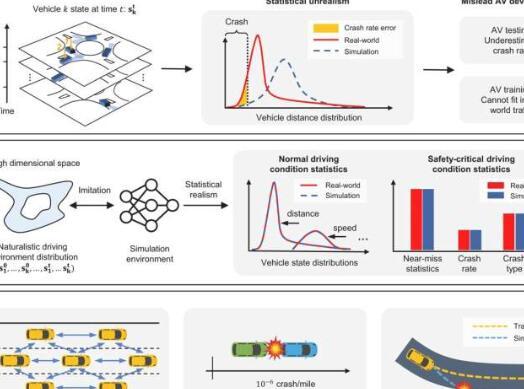
该模拟是一种机器学习模型,根据在安娜堡南侧的一个环形交叉路口收集的数据进行训练,该环形交叉路口被认为是密歇根州最容易发生碰撞的十字路口之一,距离研究团队的办公室只有几英里。
它被称为神经自然主义驾驶环境或NeuralNDE,它将这些数据转化为对驾驶员日常体验的模拟。需要像这样的虚拟道路来确保自动驾驶汽车软件在其他汽车、骑自行车者和行人穿过它的道路之前的安全。
“NeuralNDE再现了驾驶环境,更重要的是,真实地模拟了这些安全关键情况,因此我们可以评估自动驾驶汽车的安全性能,”密歇根大学土木工程教授兼Mcity主任Henry Liu说。
刘还是互联和自动化交通中心的主任,也是《自然通讯》研究的通讯作者。该出版物被列为编辑亮点。
安全关键事件需要驾驶员在瞬间做出决定并采取行动,但这种情况并不经常发生。驾驶员可以在迫使他们猛踩刹车或转向以避免碰撞的事件之间行驶数小时,并且每个事件都有其独特的情况。
总之,这些代表了模拟我们道路的两个瓶颈,分别被称为“稀有诅咒”和“维度诅咒”。维度的诅咒是由驾驶环境的复杂性引起的,其中包括路面质量、当前天气状况以及不同类型的道路使用者(包括行人和骑自行车者)等因素。
为了对这一切进行建模,团队试图看到这一切。他们在灯杆上安装了传感器系统,这些灯杆在州街/埃尔斯沃思路环形交叉路口不断收集数据。
“我们选择这个位置的原因是,环形交叉路口对于自动驾驶汽车来说是一个非常具有挑战性的城市驾驶场景。在环形交叉路口,司机必须自发地与通过十字路口的其他司机协商和合作。此外,这个特殊的环形交叉路通量很大,而且是两条车道,这增加了它的复杂性,“土木与环境工程博士生、该研究的第一作者闫新涛说。
NeuralNDE是CCAT可信赖边缘场景测试安全AI框架(SAFE TEST)的关键组成部分,该系统由刘的团队开发,使用人工智能将确保自动驾驶汽车安全所需的测试里程减少99.99%。
它基本上打破了“稀有诅咒”,引入安全关键事故的频率是实际驾驶中的一千倍。NeuralNDE对于旨在使Mcity测试设施可用于AV软件远程测试的项目也至关重要。
但与完全虚拟环境不同,这些测试是在混合现实中进行的,在封闭的测试轨道上进行,例如密歇根州伊普西兰蒂的Mcity测试设施和美国移动中心。除了赛道的真实条件外,自动驾驶汽车还体验到虚拟驾驶员、骑自行车者和行人的行为既安全又危险。通过在受控环境中测试这些场景,自动驾驶开发人员可以微调他们的系统,以更好地处理所有驾驶情况。
NeuralNDE不仅对AV开发人员有益,而且对研究人类驾驶员行为的研究人员也有好处。该模拟可以解释有关驾驶员如何响应不同场景的数据,这有助于开发功能更强大的道路基础设施。
免责声明:本文为转载,非本网原创内容,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。